Coordinate positioning: Difference between revisions
| [checked revision] | [checked revision] |
Airy Magnien (talk | contribs) mNo edit summary |
Ferri Leberl (talk | contribs) |
||
| (10 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
{{Overview|text=This chapter introduces the concept of locating railway infrastructure elements by using coordinate reference systems.}}<br /> | {{Overview|text=This chapter introduces the concept of locating railway infrastructure elements by using coordinate reference systems.}}<br /> | ||
Besides the intrinsic and the linear track-referenced coordinate system, the | Besides the intrinsic and the conventional linear track-referenced coordinate system, the {{rtm}} also allows to locate railway infrastructure elements using geodetic and geometric coordinate systems. The most known example in this case is the [https://en.wikipedia.org/wiki/World_Geodetic_System World Geodetic System WGS84] that is also used by the Global Navigation Satellite Systems like GPS or GALILEO. However, there is more than one geodetic coordinate system. Thus, the same infrastructure elements can be located with multiple coordinate systems, their correspondence being established in the model.<br /> | ||
<gallery> | <gallery> | ||
File:GeometricCoordinates.png|Geometric Coordinates (© RFF/SNCF Réseau) | File:GeometricCoordinates.png|Geometric Coordinates (© RFF/SNCF Réseau) | ||
| Line 7: | Line 7: | ||
= General = | = General = | ||
A geometric coordinate system can either be a projected X, Y, Z coordinate, a λ, ϕ, h geodetic coordinate or even an X, Y(, Z) schematic plan coordinate.<br /> | == Geometric coordinates == | ||
It could be read as "at coordinate X, Y, Z in the system [EPSG:xxxxx] [01/06/2014] | A geometric coordinate system can either be a projected X, Y, Z coordinate system, or a λ, ϕ, h geodetic coordinate system, or even an X, Y(, Z) schematic plan coordinate system.<br /> | ||
The model integrates a link between the linear positioning system and the intrinsic positioning system. It supports the "conversion" of an element position associated with a number between 0 and 1 to a kilometric point on its reference system.<br /> | It could be read as "at coordinate X, Y, Z in the system [EPSG:xxxxx] [01/06/2014]". More information about the EPSG code as catalogue of geodetic positioning sytems is provided in the next main chapter.<br /> | ||
Geometric coordinates are quite familiar in other models and data exchange formats, too. For implementation, {{rtm}} includes basic concepts for positioning defined within the [https://en.wikipedia.org/wiki/Geography_Markup_Language Geography Markup Language GML]. | |||
== Linear coordinates == | |||
The model integrates a link between the linear positioning system and the intrinsic positioning system. It supports the "conversion" of an element position associated with a number between 0 and 1 to a kilometric point on its reference system. In the shown example the middle of the track / linear NetElement is referenced with the mileage value of 122 kilometers.<br /> | |||
<gallery> | <gallery> | ||
| Line 16: | Line 21: | ||
= EPSG Code = | = EPSG Code = | ||
As there are a number of different coordinate reference systems with different parameter sets available, it is important to identify the coordinate system without ambiguity. The International Association of Oil & Gas Producers set up the EPSG Geodetic Parameter Registry, which provides a unique code for every coordinate system. The websites http://spatialreference.org/ and http://www.epsg-registry.org/ can be used to obtain an overview about different coordinate systems by their EPSG code. | As there are a number of different coordinate reference systems with different parameter sets available, it is important to identify the coordinate system without ambiguity. The International Association of Oil & Gas Producers set up the EPSG (European Petroleum Survey Group) Geodetic Parameter Registry, which provides a unique code for every coordinate system. The websites http://spatialreference.org/ and http://www.epsg-registry.org/ can be used to obtain an overview about different coordinate systems by their EPSG code. | ||
== Examples == | == Examples == | ||
| Line 23: | Line 28: | ||
* EPSG code for the height coordinate system DHHN92: urn:ogc:def:crs:EPSG::5783 | * EPSG code for the height coordinate system DHHN92: urn:ogc:def:crs:EPSG::5783 | ||
= Relevant classes in the | = Relevant classes in the {{rtm}} = | ||
The classes, used to define the location and positioning systems and their coordinates, are: | The classes, used to define the location and positioning systems and their coordinates, are: | ||
* '''PositioningSystem''': This class defines the general concept of a Coordinate Reference System used for positioning. | * '''PositioningSystem''': This class defines the general concept of a Coordinate Reference System used for positioning. | ||
* '''LinearPositioningSystem''': This class defines a Linear Referencing System. It defines a start and an end coordinate. | * '''LinearPositioningSystem''': This class defines a Linear Referencing System. It defines a start and an end coordinate. | ||
* '''LinearAnchorPoints''': this class describes the reference points within the linear reference system (Milestones, anomaly points...) and their characteristics. | * '''LinearAnchorPoints''': this class describes the reference points within the linear reference system (Milestones, anomaly points like gaps and overlaps...) and their characteristics. | ||
* '''LinearCoordinate''': This class | * '''LinearCoordinate''': This class is used for providing a location expressed in a Linear Reference System (LRS). | ||
* '''GeometricPositioningSystem''': This class defines a Geometrical Reference System, so it allows to locate a resource with its geometrical coordinates (x, y, z or λ, ϕ, h). The class provides the parameter ''crsDefinition'' to define the Coordinate Reference System. This parameter shall be used to name the EPSG code and thus define all the relevant parameters of the coordinate system. | * '''GeometricPositioningSystem''': This class defines a Geometrical Reference System, so it allows to locate a resource with its geometrical coordinates (x, y, z or λ, ϕ, h). The class provides the parameter ''crsDefinition'' to define the Coordinate Reference System. This parameter shall be used to name the EPSG code and thus define all the relevant parameters of the coordinate system. | ||
* '''GeometricCoordinate''': This class defines the localization expressed in a geometrical (or geographical) Reference System, so it defines the coordinates (x, y, z or λ, ϕ, h). | * '''GeometricCoordinate''': This class defines the localization expressed in a geometrical (or geographical) Reference System, so it defines the coordinates (x, y, z or λ, ϕ, h). | ||
| Line 35: | Line 40: | ||
* '''AssociatedPositioningSystem''': This class allows to group couples of coordinates to define the translation parameters between an external (geometric or linear) coordinate system and the element’s intrinsic coordinate system. | * '''AssociatedPositioningSystem''': This class allows to group couples of coordinates to define the translation parameters between an external (geometric or linear) coordinate system and the element’s intrinsic coordinate system. | ||
{{navi | |||
|lesson=<br> | |||
* Coordinate reference systems are (besides intrinsic and conventional linear referencing) the third option to define positions/locations in the {{rtm}}. | |||
* Coordinate reference systems are (besides intrinsic and linear referencing) the third option to define positions in the | |||
* All geodetic coordinate reference systems can be defined by a unique identifier: the EPSG code. | * All geodetic coordinate reference systems can be defined by a unique identifier: the EPSG code. | ||
* Coordinate reference systems can be | * {{rtm}} implementation shall follow concepts of the existing international standard GML. | ||
|} | * Coordinate reference systems can also be used to define schematic coordinates as they are used in terms of screen coordinates. | ||
|chapter={{RTM}} modelling concepts | |||
|chapterlink=RTM modelling concepts | |||
{| | |prev=Structure | ||
| | |next=Object positioning in the network | ||
|pchapter={{rtm}} Quick Start | |||
| | |pchapterlink=RTM Quick Start | ||
| [[Positioning]] | | |nchapter={{rtm}} External References | ||
|nchapterlink=RTM External References | |||
|subsection=Coordinate positioning | |||
|section=[[Positioning]] | |||
|snext=Linear Positioning / referencing | |||
}} | |||
Revision as of 17:30, 13 March 2017
|
Besides the intrinsic and the conventional linear track-referenced coordinate system, the RailTopoModel® also allows to locate railway infrastructure elements using geodetic and geometric coordinate systems. The most known example in this case is the World Geodetic System WGS84 that is also used by the Global Navigation Satellite Systems like GPS or GALILEO. However, there is more than one geodetic coordinate system. Thus, the same infrastructure elements can be located with multiple coordinate systems, their correspondence being established in the model.
Geometric Coordinates (© RFF/SNCF Réseau)

General
Geometric coordinates
A geometric coordinate system can either be a projected X, Y, Z coordinate system, or a λ, ϕ, h geodetic coordinate system, or even an X, Y(, Z) schematic plan coordinate system.
It could be read as "at coordinate X, Y, Z in the system [EPSG:xxxxx] [01/06/2014]". More information about the EPSG code as catalogue of geodetic positioning sytems is provided in the next main chapter.
Geometric coordinates are quite familiar in other models and data exchange formats, too. For implementation, RailTopoModel® includes basic concepts for positioning defined within the Geography Markup Language GML.
Linear coordinates
The model integrates a link between the linear positioning system and the intrinsic positioning system. It supports the "conversion" of an element position associated with a number between 0 and 1 to a kilometric point on its reference system. In the shown example the middle of the track / linear NetElement is referenced with the mileage value of 122 kilometers.
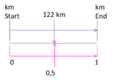
Conversion Board (© RFF/SNCF Réseau)

EPSG Code
As there are a number of different coordinate reference systems with different parameter sets available, it is important to identify the coordinate system without ambiguity. The International Association of Oil & Gas Producers set up the EPSG (European Petroleum Survey Group) Geodetic Parameter Registry, which provides a unique code for every coordinate system. The websites http://spatialreference.org/ and http://www.epsg-registry.org/ can be used to obtain an overview about different coordinate systems by their EPSG code.
Examples
- EPSG code for World Geodetic System WGS84: urn:ogc:def:crs:EPSG::4326
- EPSG code for ETRS89 / ETRS-TM32: urn:ogc:def:crs:EPSG::3044
- EPSG code for the height coordinate system DHHN92: urn:ogc:def:crs:EPSG::5783
Relevant classes in the RailTopoModel®
The classes, used to define the location and positioning systems and their coordinates, are:
- PositioningSystem: This class defines the general concept of a Coordinate Reference System used for positioning.
- LinearPositioningSystem: This class defines a Linear Referencing System. It defines a start and an end coordinate.
- LinearAnchorPoints: this class describes the reference points within the linear reference system (Milestones, anomaly points like gaps and overlaps...) and their characteristics.
- LinearCoordinate: This class is used for providing a location expressed in a Linear Reference System (LRS).
- GeometricPositioningSystem: This class defines a Geometrical Reference System, so it allows to locate a resource with its geometrical coordinates (x, y, z or λ, ϕ, h). The class provides the parameter crsDefinition to define the Coordinate Reference System. This parameter shall be used to name the EPSG code and thus define all the relevant parameters of the coordinate system.
- GeometricCoordinate: This class defines the localization expressed in a geometrical (or geographical) Reference System, so it defines the coordinates (x, y, z or λ, ϕ, h).
- PositioningSystemCoordinate: This class represents a coordinate in either a geometric or linear reference system.
- IntrinsicCoordinate: This class allows associating an intrinsic coordinate coming from the topology network to another coordinate, either geographic or linear.
- AssociatedPositioningSystem: This class allows to group couples of coordinates to define the translation parameters between an external (geometric or linear) coordinate system and the element’s intrinsic coordinate system.
| What you should have learned | |||
|---|---|---|---|
| |||
| Navigation | |||
| Home | ← | • | → |
| Chapter | RailTopoModel® Quick Start | RailTopoModel® modelling concepts | RailTopoModel® External References |
| Section | Structure | Positioning | Object positioning in the network |
| Subection | Coordinate positioning | Linear Positioning / referencing | |