Coordinate positioning
|
Systems of this kind are based on the concept of Geometrical coordinates.
Geometric Coordinates (© RFF/SNCF Réseau)

It could either be a projected X, Y, Z coordinate, a λ, ϕ, h geodetic coordinate or even an X, Y(, Z) schematic plan coordinate.
It could be read as “at coordinate X, Y, Z in the system [EPSG:xxxxx] [01/06/2014]4” [4: The exact content of the definition string of the geometric system is not yet definitve]
The model integrates a link between the linear positioning system and the intrinsic positioning system. It supports the "conversion" of an element position associated with a number between 0 and 1 to a kilometric point on its reference system.
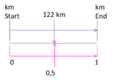
Conversion Board (© RFF/SNCF Réseau)

Comment:
An example of an aggregation mechanism is depicted in Annex B.
The classes, used to define the location and positioning systems, are:
- PositioningSystem: This class defines the general concept of a Reference System.
- LinearPositioningSystem: This class defines a Linear Referencing System. It defines a starting and an ending coordinate.
- LinearAnchorPoints: this class describes the reference points in the linear reference system (Milestones, anomaly points…) and their characteristics.
- LinearCoordinate: This class defines the localization expressed in a Linear Reference System (LRS).
- GeometricPositioningSystem: This class defines a Geometrical Reference System, so it allows to localise a resource with his geometrical coordinates (x, y, z or λ, ϕ, h).
- GeometricCoordinate: This class defines the localization expressed in a geometrical (or geographical) Reference System, so it defines the coordinates (x, y, z or λ, ϕ, h).
- PositioningSystemCoordinate: This class represent a coordinate in either a geometric or linear reference system.
- IntrinsicCoordinate: This class allows associating an intrinsic coordinate to another coordinate, either geographic or linear.
- AssociatedPositioningSystem: This class allows to group couples of coordinates to define the translation parameters between an external (geometric or linear) coordinate system and the element’s intrinsic coordinate system.
| Back To | Previous Chapter | Next Chapter |
|---|---|---|
| Positioning | - | Track-referred positioning |