Track-referred positioning: Difference between revisions
| [checked revision] | [checked revision] |
mNo edit summary |
mNo edit summary |
||
| Line 1: | Line 1: | ||
{{Overview|text=Lorem ipsum...}}<br /> | {{Overview|text=Lorem ipsum...}}<br /> | ||
Revision as of 19:33, 18 April 2016
|
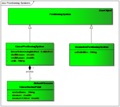
Traditional Positioning
Localization expressed in a linear reference system, generally a coordinate along a predefined axis.

Axis for an LPS
It could be read as “at coordinate X on the line Y” (being aware that the line Y is composed of many elements).
In the context of the RailTopoModel traditional positioning systems are either LRS based or based on geometric coordinate systems in their broadest meaning.
LRS based positioning systems are defined by the LinearReferencingMethod, the start measure, the end measure und the units of the measurement.
To describe local anomalies the class “LinearAnchorPoint” is provided. The attribute “measureToNext” allows to modify the basis for the interpolation of location in the interval towards the next “LinearAnchorPoint” instance.
“GeometricPositioningSystem” instances are defined using their Coordinate Reference System definition.
To locate “NetEntity” instances the class “PositioningSystemCoordinate” and the two derived classes “LinearCoordinate” and “GeometricCoordinate” are provided for traditional positioning.
A “LinearCoordinate” instance is defined by the measure, the lateral offset and the vertical offset. The attribute “measure” defines the position at the “line of reference” (possibly adjusted to local anomalies using “LinearAnchorPosition”).
In case the location is not precisely at the “line of reference” the attribute “LateralOffset” allows to define the perpendicular distance to the “line of reference”. Likewise the attribute “verticalOffset” is provided to define heights using the “line of reference” as baseline.
Positioning Systems (Language Unit)
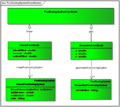
Positioning Systems Coordinates (Lamguage Unit)


Other system

Linear Approach

In this case we manage the position of the object with another reference system (linear for instance)
As the relation between the intrinsic and the linear positioning system is known, the translation to intrinsic is computable when (and if) needed.
Conclusion
In both case the coordinate is known (or computable) either in linear and intrinsic coordinate system.
The second case will be preferred (but not mandatory) for manually entered data (we manage the object for itself), the first case will be preferred (but not mandatory) in calculation/calculated data or data transmission (we compute the interactions).
In both case a relation has to be laid between the element (trail in this case) and the positioning system (else you cannot relate objects on this element), but this would be the case whatever the storage method.
| What you should have learned Lorem ipsum...
|
| Back To | Previous Chapter | Next Chapter |
|---|---|---|
| Positioning | Coordinate positioning | Intrinsic positioning / referencing |